Soroush Zare
Ph.D. Candidate
University of Virginia
About
I am a PhD Candidate at the University of Virginia specializing in AI-driven brain-computer interfaces and intelligent robotics. My research focuses on developing cutting-edge technologies that bridge neuroscience and engineering, with applications in neurorehabilitation, assistive robotics, and human-machine interaction. I combine expertise in EEG signal processing, deep learning, and reinforcement learning to create innovative solutions for real-world healthcare challenges. As a member of the WEARLab, I contribute to advancing wearable robotics and intelligent rehabilitation systems that improve quality of life for individuals with mobility impairments.
Research Focus
- Brain-Computer Interfaces (BCI): EEG signal processing and neural decoding
- Artificial Intelligence: Deep learning, reinforcement learning, and transformer models
- Robotic Control & Automation: Advanced control systems, ROS (Robot Operating System), real-time control optimization, and industrial automation
- Wearable Robotics: Soft exoskeletons and rehabilitation systems
- Neurorehabilitation: Adaptive control strategies for motor recovery
Research Experience
🔬 Research Assistant | University of Virginia
Charlottesville, VA • Jan. 2023 - Present
- Designing and developing soft upper limb rehabilitation exoskeleton
- Contributed to the design and control of wearable soft rehabilitation robots using soft materials and 3D printing techniques
- Developed transformer-based deep learning pipelines to decode EEG motor imagery for real-time control of upper-limb exoskeletons
- Focused on non-invasive EEG signal acquisition, pre-processing, and classification to interpret motor intent and autonomic patterns
- Collaborating in interdisciplinary teams to integrate high-resolution EEG technologies with real-time motor function support systems
- Innovating non-invasive EEG sensor technology to reduce setup complexity and enhance user comfort in real-world applications
🔬 Research Assistant | York University
Toronto, Canada • Sept. 2022 - Jan. 2023
- Developed and simulated robotic grasping mechanisms using UR5 robotic arm in ROS (Robot Operating System)
- Utilized Gazebo for real-time simulation and testing of robotic control algorithms
- Implemented deep reinforcement learning techniques for intelligent robotic manipulation
🔬 Research Assistant | University of Tehran
Tehran, Iran • Sept. 2018 - Sept. 2022
Member of Human and Robot Interaction Laboratory (TaarLab)
- Control Cable-Driven Parallel Robot (CDPR) Using Deep Reinforcement Learning
- Construct 3-D model of Objects Using CDPR
- AI-based Object Tracking Using CDPR
- System Identification of Suspended Under-constrained Cable-driven Robot
- Control of Suspended Under-constrained Cable-driven Robot Creating 3D Graphical Model of Objects
Projects
🧠 EEGDiffFormer: Transformer-based EEG Decoder
Developed a state-of-the-art transformer-based architecture for EEG motor imagery classification, achieving superior performance in intent validation and robotic adaptation.
💪 NeuroMotion: EEG-Driven Soft Exoskeleton
Designed and implemented a soft exoskeleton system that adapts to user movements using reinforcement learning algorithms and real-time EEG signal processing.
🚴 VR-Bike EEG Study: Neuroplasticity Enhancement
Integrated EEG monitoring with virtual reality cycling to study and enhance neuroplasticity in rehabilitation settings.
🤖 Smart Grasping (UR5): Deep RL in Robotics
Developed intelligent grasping algorithms using deep reinforcement learning for the UR5 robotic arm in Gazebo simulation environment.
🤖 Linux for Robotics: Obstacle Avoidance
Real-time autonomous robot navigation using Bash scripting, ROS 2, and Gazebo simulation. Built for the Linux for Robotics Certificate by The Construct.
Publications
-
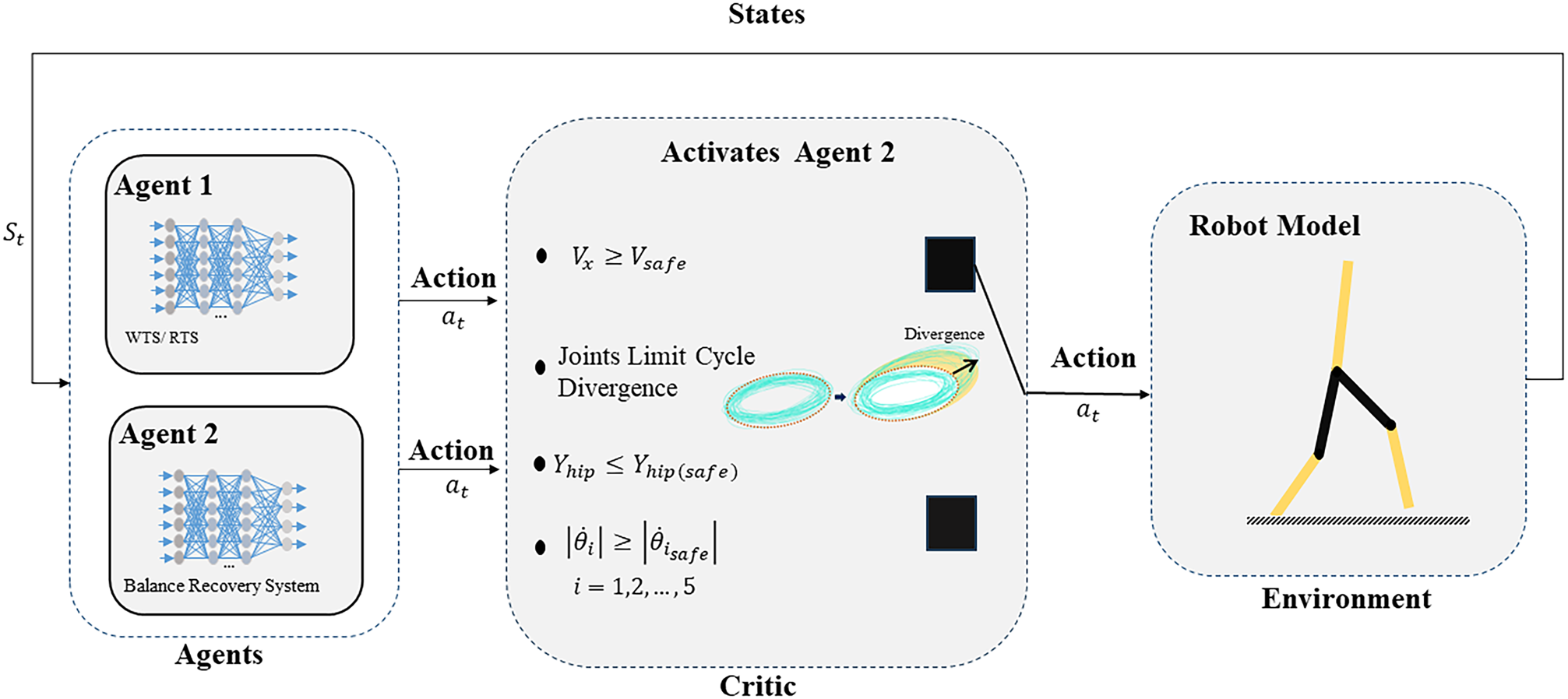
Robust Underactuated Point-feet Bipedal Locomotion Using Deep Reinforcement Learning and a Balance Recovery System
Developed a multi-agent deep reinforcement learning framework for robust bipedal robot locomotion. The system combines two agents: one for walking/running control and another for balance recovery, enabling stable locomotion even under disturbances.
-
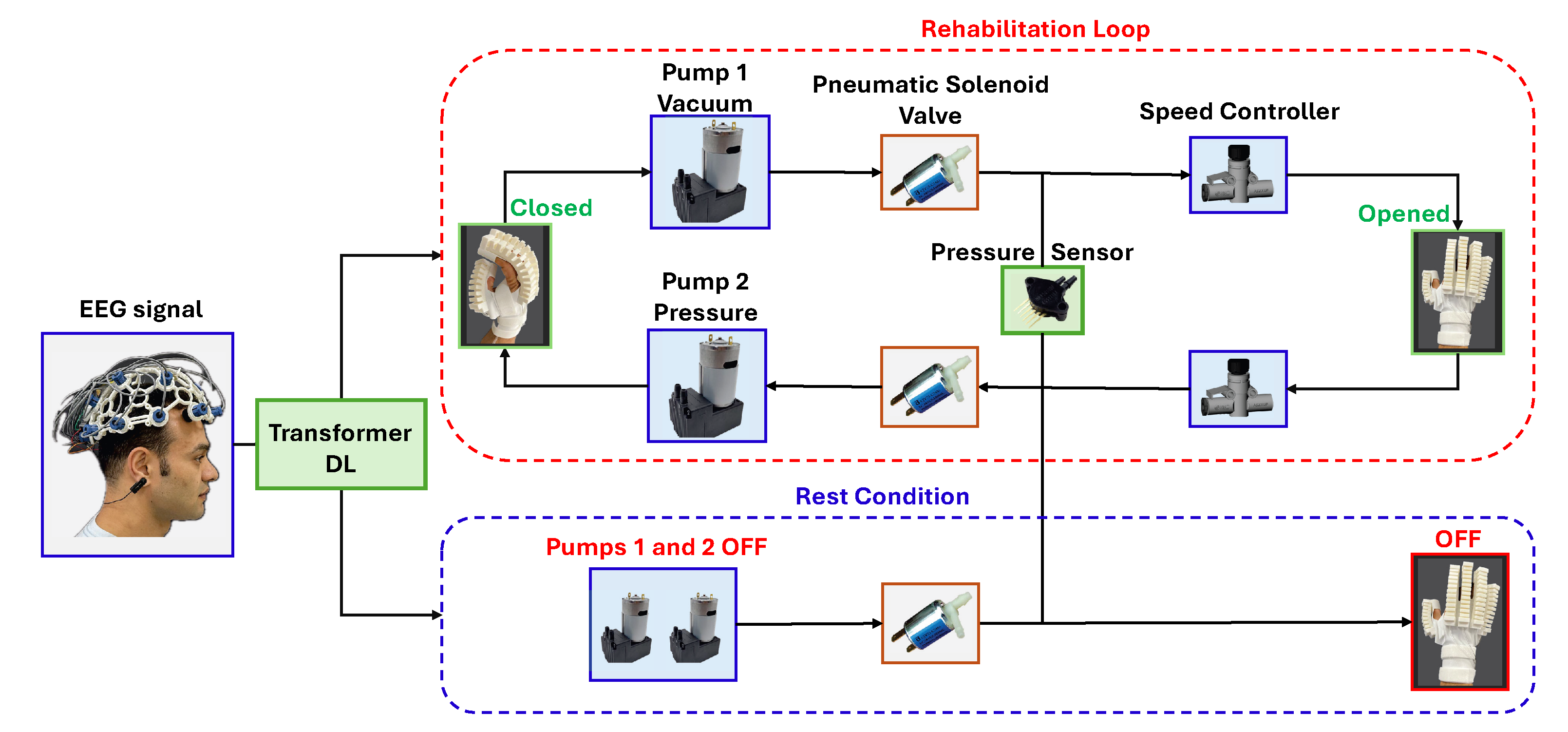
NeuroFlex: Feasibility of EEG-Based Motor Imagery Control of a Soft Glove for Hand Rehabilitation
Developed an EEG-based brain-computer interface system for controlling a soft robotic glove. The system uses transformer-based deep learning to decode motor imagery signals from EEG, enabling real-time control of the rehabilitation glove for hand therapy.
-
EEG Motor Imagery Classification using Integrated Transformer-CNN for Assistive Technology Control
Developed an integrated transformer-CNN architecture for classifying EEG motor imagery signals. The model combines convolutional neural networks for feature extraction with transformer attention mechanisms for improved classification accuracy in assistive technology applications.
-
A Low-Cost Wearable Exoskeleton for Sitting and Standing Assistance
Designed a low-cost wearable exoskeleton system to assist individuals with mobility impairments during sitting and standing transitions. The system features smooth acceleration/deceleration control and adaptive motion support for enhanced user comfort and safety.
- Wearable upper limb robotics for pervasive health: A review
- Experimental Study on the Control of a Suspended Cable-driven Parallel Robot for Object Tracking Purpose
- Kinematic Analysis of an Under-constrained Cable-driven Robot Using Neural Networks
- Reconstructing 3-D Graphical Model Using an Under-Constrained Cable-Driven Parallel Robot
- MIMO Dynamic Control of a Suspended Underactuated Cable Robot Using Genetic Algorithm
Awards
- Olsen Graduate Fellowship – University of Virginia (2025)
- Outstanding Graduate Research Award – University of Virginia (2025)
- Best Poster Award – Mechanical and Aerospace Engineering, University of Virginia (2025)
- Best Researcher Award in Engineering – Popular Scientist (2025)
- NSF Student Travel Award – CHASE 2024
- GRADESTAR Fellowship – University of Virginia (2023–2024)
- York Graduate Scholarship – York University (2022–2023)
Professional Leadership & Services
🎓 Leadership & Service
- Vice President - Graduate Student Board, Mechanical and Aerospace Engineering, UVA, 2024
- Recruitment Chair - Graduate Student Board, Mechanical and Aerospace Engineering, UVA, 2023
- Student Member - Institute of Electrical and Electronics Engineers (IEEE)
📝 Reviews
- Advanced Science
- Journal of Neural Engineering
- ACM Transactions on Computing for Healthcare
- Smart Materials and Structures
- Bioinspiration & Biomimetics
- Progress in Biomedical Engineering
- Mechanism and Machine Theory
- Smart Health
- Robotica
- Biomedical Physics & Engineering Express
- Engineering Research Express
- IEEE BSN 2025 Conference
- IEEE BSN 2024 Conference
- IEEE/ACM CHASE 2024 Conference